Hola de nuevo, este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
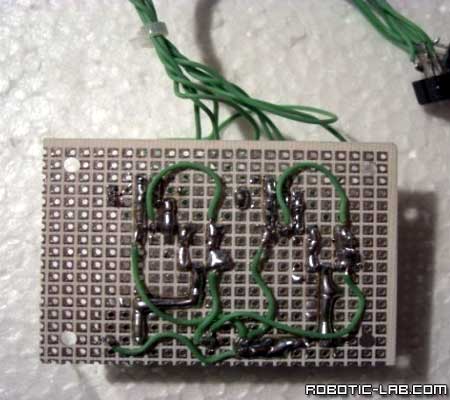
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
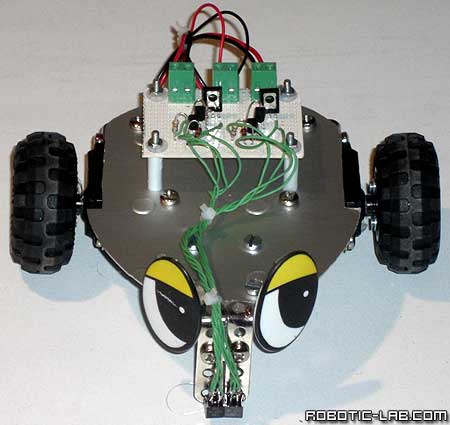
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
No hay comentarios:
Publicar un comentario